Wearable Expressive Audio
Wearable to enhance musical accessibility for individuals interested in exploring and creating music without any rules.
Duration
3 month
Role
Solo

Wearable to enhance musical accessibility for individuals interested in exploring and creating music without any rules.
Duration
3 month
Role
Solo
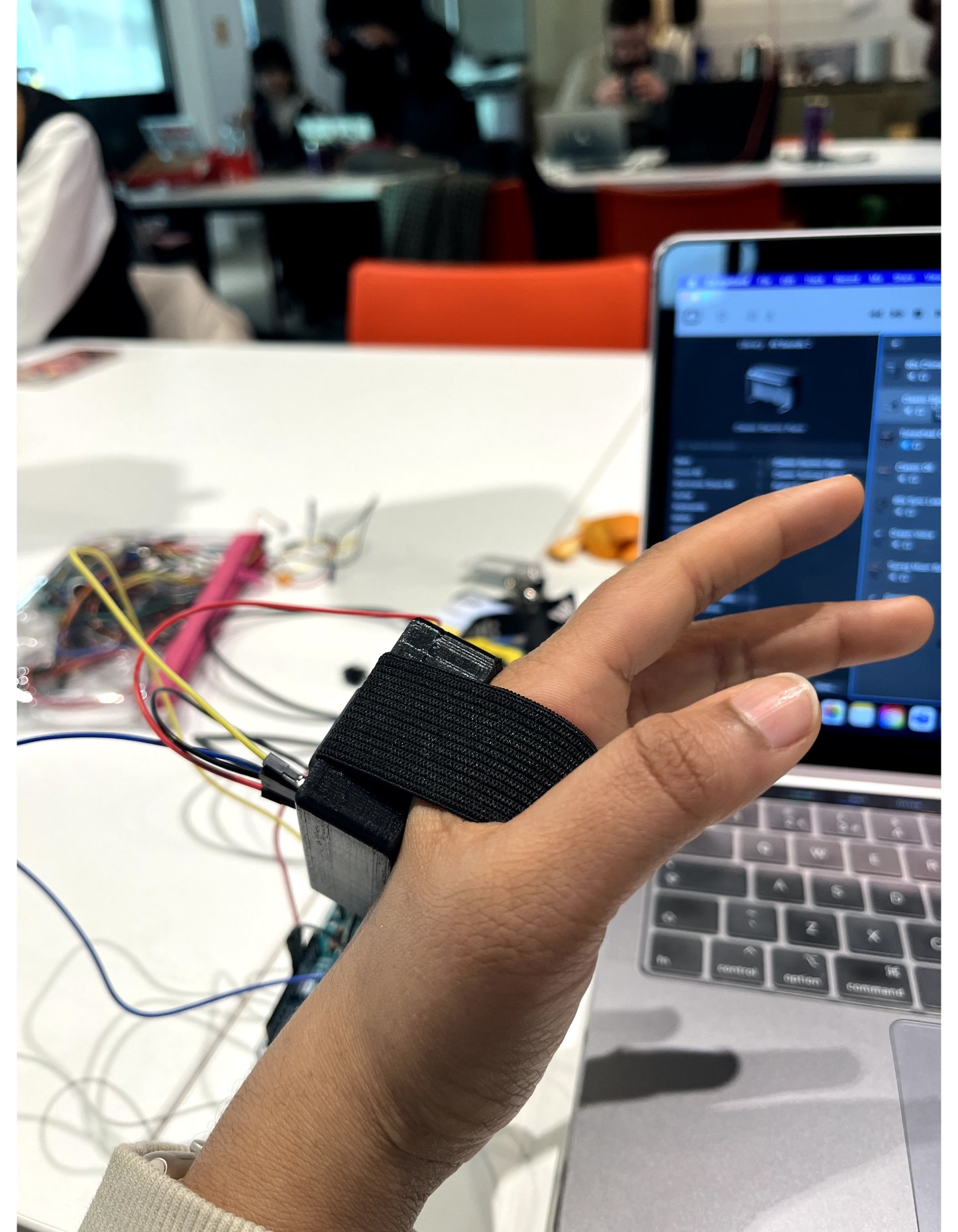
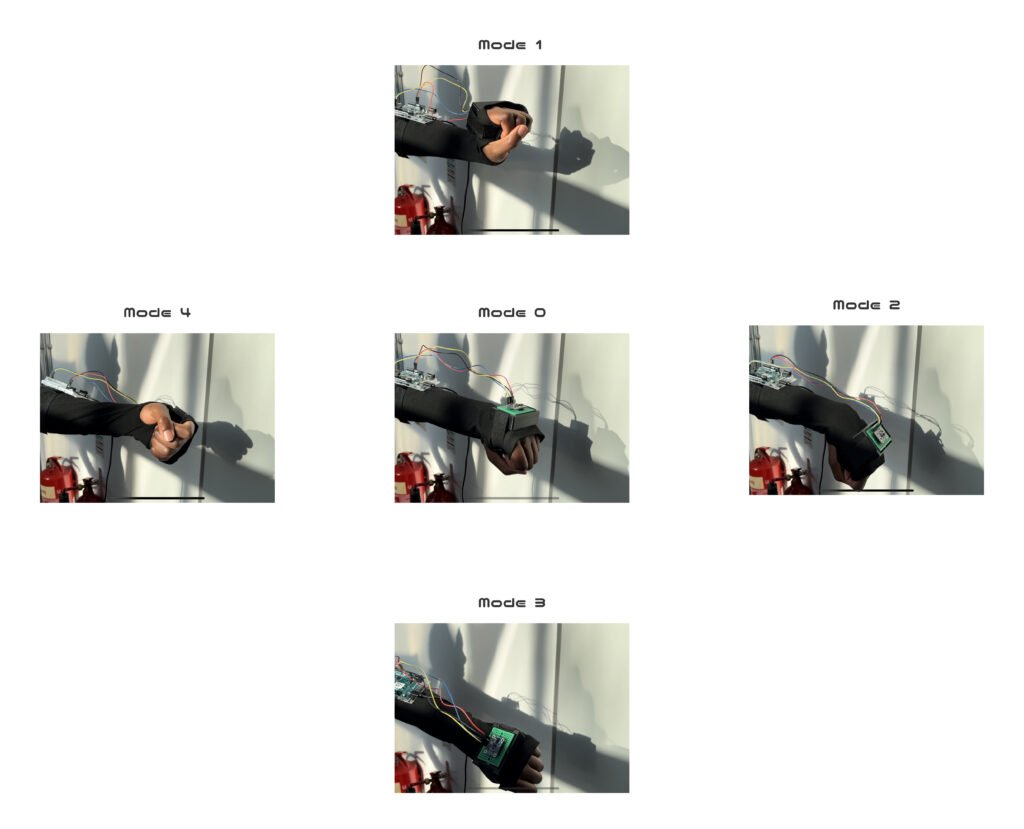
The wearable has 5 modes and each mode plays different midi notes. Each mode is mapped by different X,Y and Z. So it makes to hard to recreate some of the same notes that makes it unique in a ways it will be different when anyone plays it. Once you went through the mode you will have an idea which mode and the positions have highest notes to lowest. My goal was it to make it easy for anyone to explore and create music.